 IEEE/ICACT20240299 Slide.04
[Big Slide]
Oral Presentation
IEEE/ICACT20240299 Slide.04
[Big Slide]
Oral Presentation 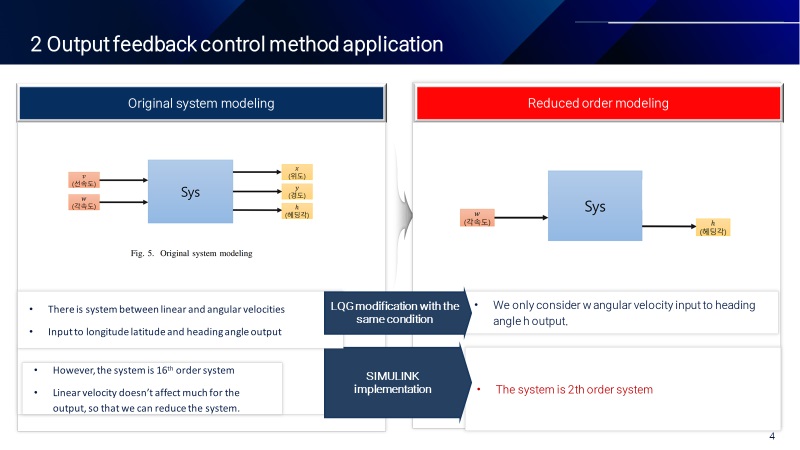
| Virual Oral Presentation Slide by Slide |
|
IEEE/ICACT20240299 Slide.04
[Big Slide]
| Oral Presentation |
|
|
|
In this presenatation we explain how we apply output feedback controller into simulator. Firstly, we consider whole inputs(linear and angular velocities signals), in that case, the system modeling is 12 th order system. Since v is related to x,y,h, each system modeling is 2 th order system. But in this case, it is complex to model. Hence we reduce the model into 2th order system only considering angular velocities signal w and output heading angle h. | |
| [Go to Next Slide] |