 IEEE/ICACT20240299 Slide.09
[Big Slide]
Oral Presentation
IEEE/ICACT20240299 Slide.09
[Big Slide]
Oral Presentation 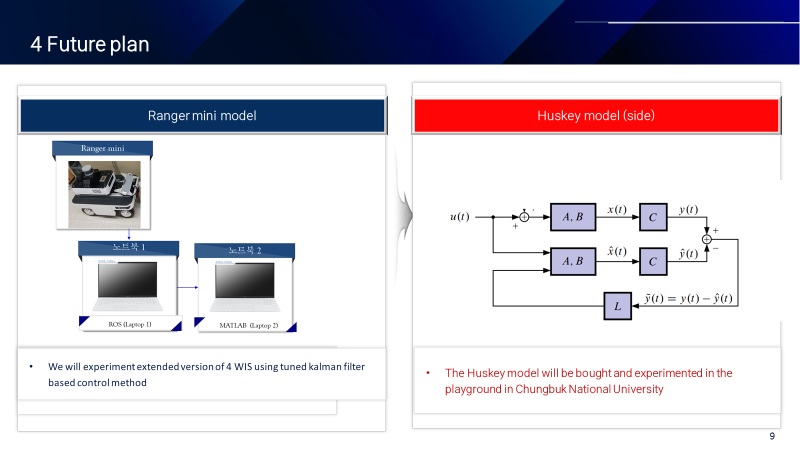
| Virual Oral Presentation Slide by Slide |
|
IEEE/ICACT20240299 Slide.09
[Big Slide]
| Oral Presentation |
|
|
|
We are going to connect MATLAB window laptop into ROS ubuntu laptop. Also ROS ubuntu laptop is connected into 4 in-wheel, and 4 steering motors in the mobile platform. We are also doing closed loop simulation from open loop experiment, then we will achieve revised input from simulation in order to reduce actual path from desired path | |
| [Go to Next Slide] |