ICACT20220272 Slide.16
[Big slide for presentation]
ICACT20220272 Slide.16
[Big slide for presentation]
|
Chrome Text-to-Speach Click!! Click!! |
 |
We would like to thank you for your attention.
Feel free to ask me any questions!
|
|
ICACT20220272 Slide.15
[Big slide for presentation]
|
Chrome Text-to-Speach Click!! |
 |
These results show that with proper feature extraction, Random
Forest can provide a reliable model for flying target classification.
|
|
ICACT20220272 Slide.14
[Big slide for presentation]
|
Chrome Text-to-Speach Click!! |
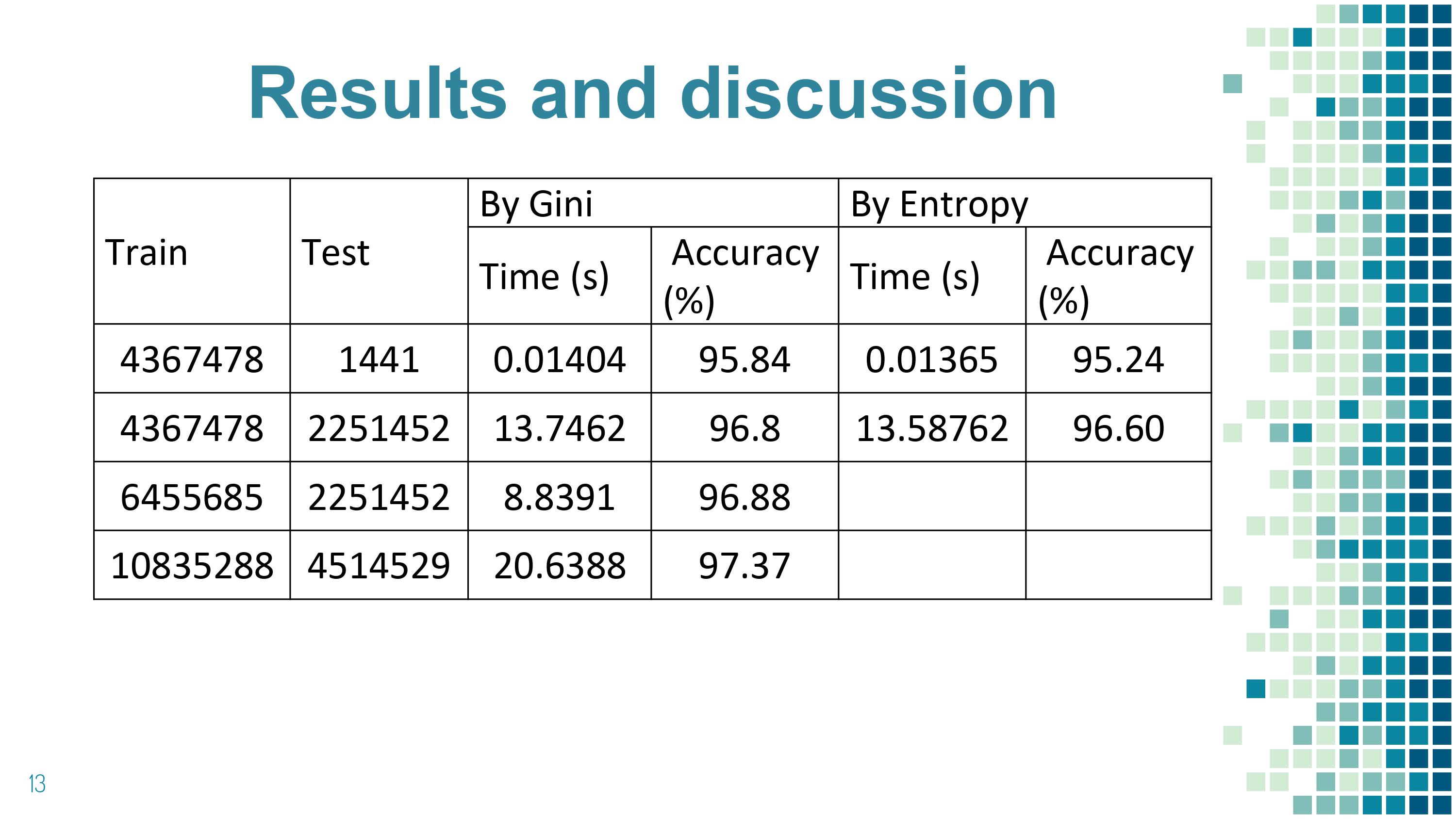 |
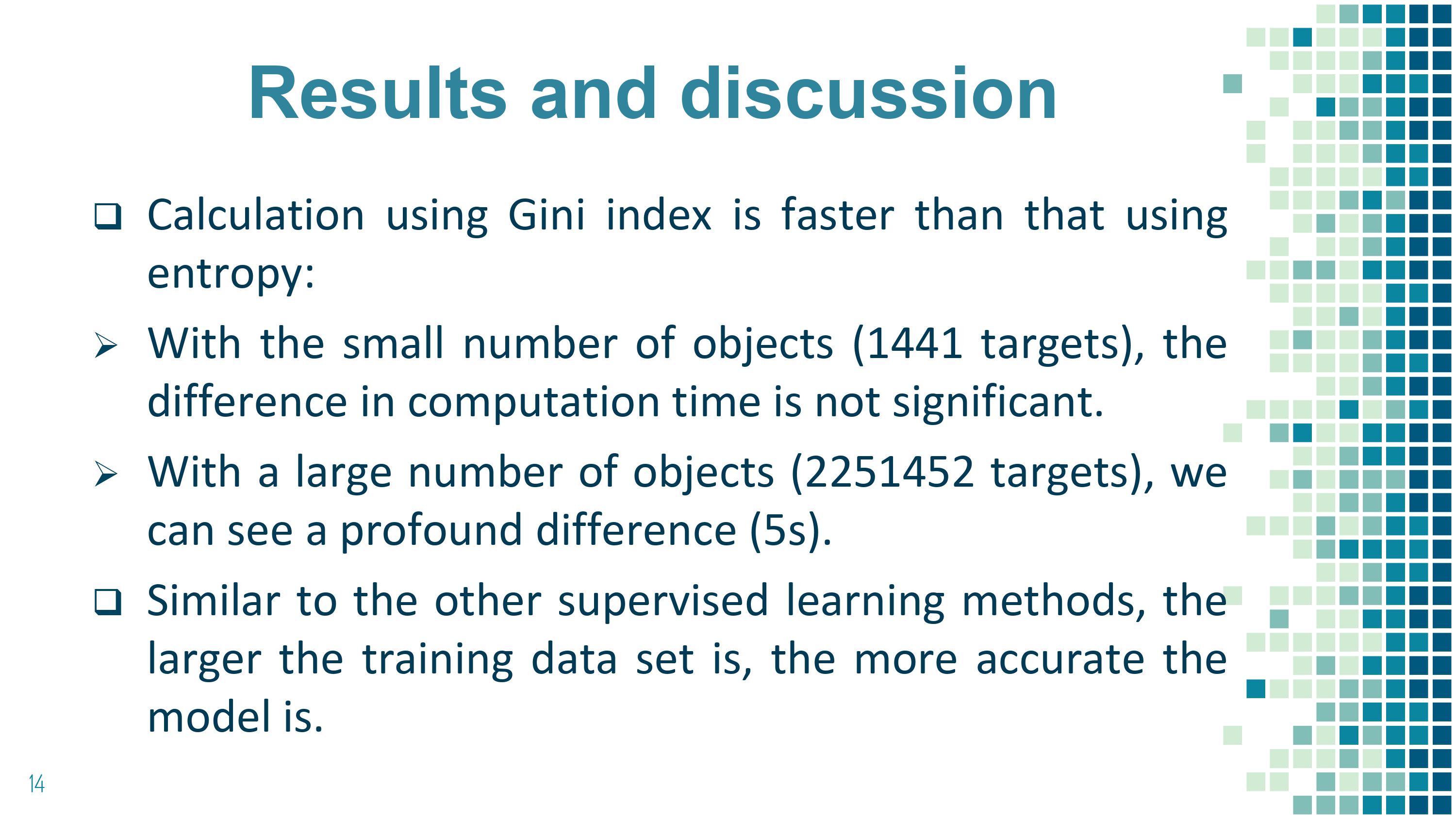
Here are the results.
There are some remarkable observations. Calculation using
Gini index is faster than that using entropy. With the small
number of objects (1441 targets), the difference in computation
time is not significant, but with a large number of objects
(2251452 targets), we can see a profound difference (5s). The
accuracy of the classification results in these two methods
reaches the same level.
When we increase the size of the training data set to 1093628, the accuracy reaches 97.36 %
|
|
ICACT20220272 Slide.13
[Big slide for presentation]
|
Chrome Text-to-Speach Click!! |
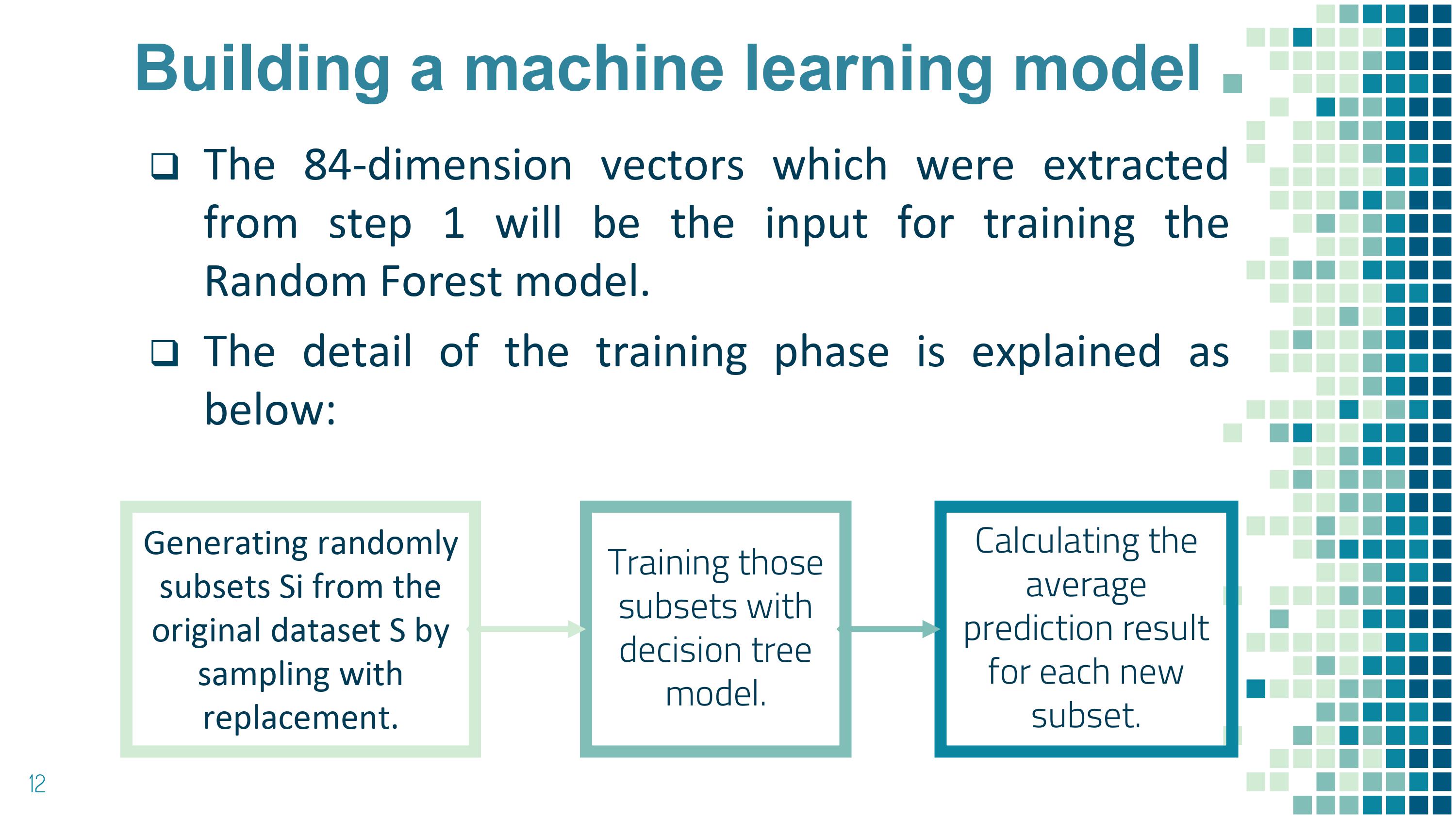 |
The detail of the training phase is explained as below: Generating randomly subsets Si from the original dataset S by sampling with replacement; Training those subsets with decision tree model; Calculating the average prediction result for each new subset.
After training the Random Forest model, to identify the class labels of the flying targets, we conduct extracting features of the flying targets and traversing them through each decision tree of the Random Forest. Each decision tree will give a vote for a class label with the input data are 84-dimensional vectors. Aggregating the vote on each decision tree, we finalize the class label of the flying target based on majority voting. The class label which received the most votes is the class label of the flying target. In case there are class labels that received the same number of votes, we choose one label randomly.
|
|
ICACT20220272 Slide.12
[Big slide for presentation]
|
Chrome Text-to-Speach Click!! |
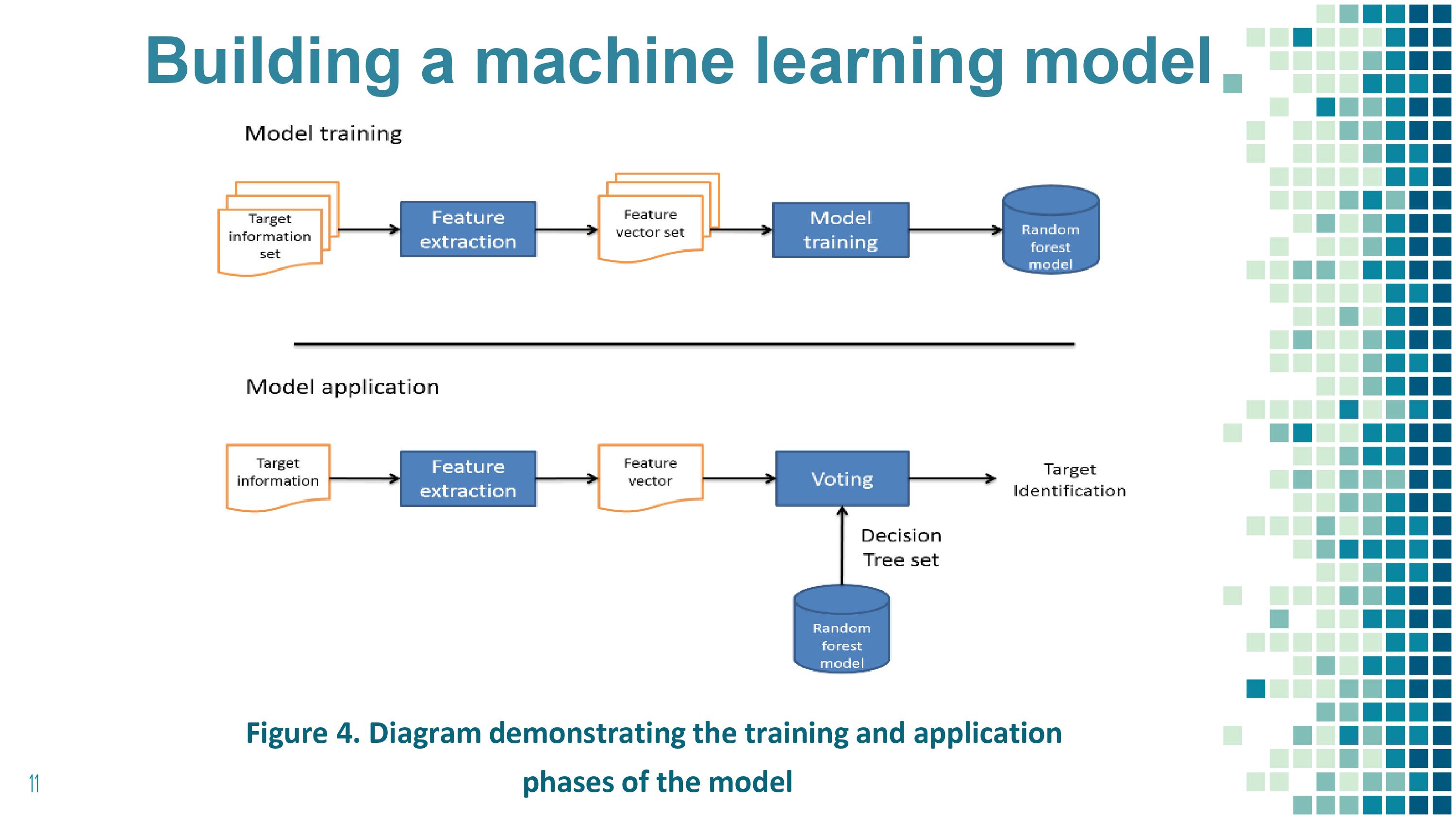 |
This slice shows our processes of training model and application of the model.
|
|
ICACT20220272 Slide.11
[Big slide for presentation]
|
Chrome Text-to-Speach Click!! |
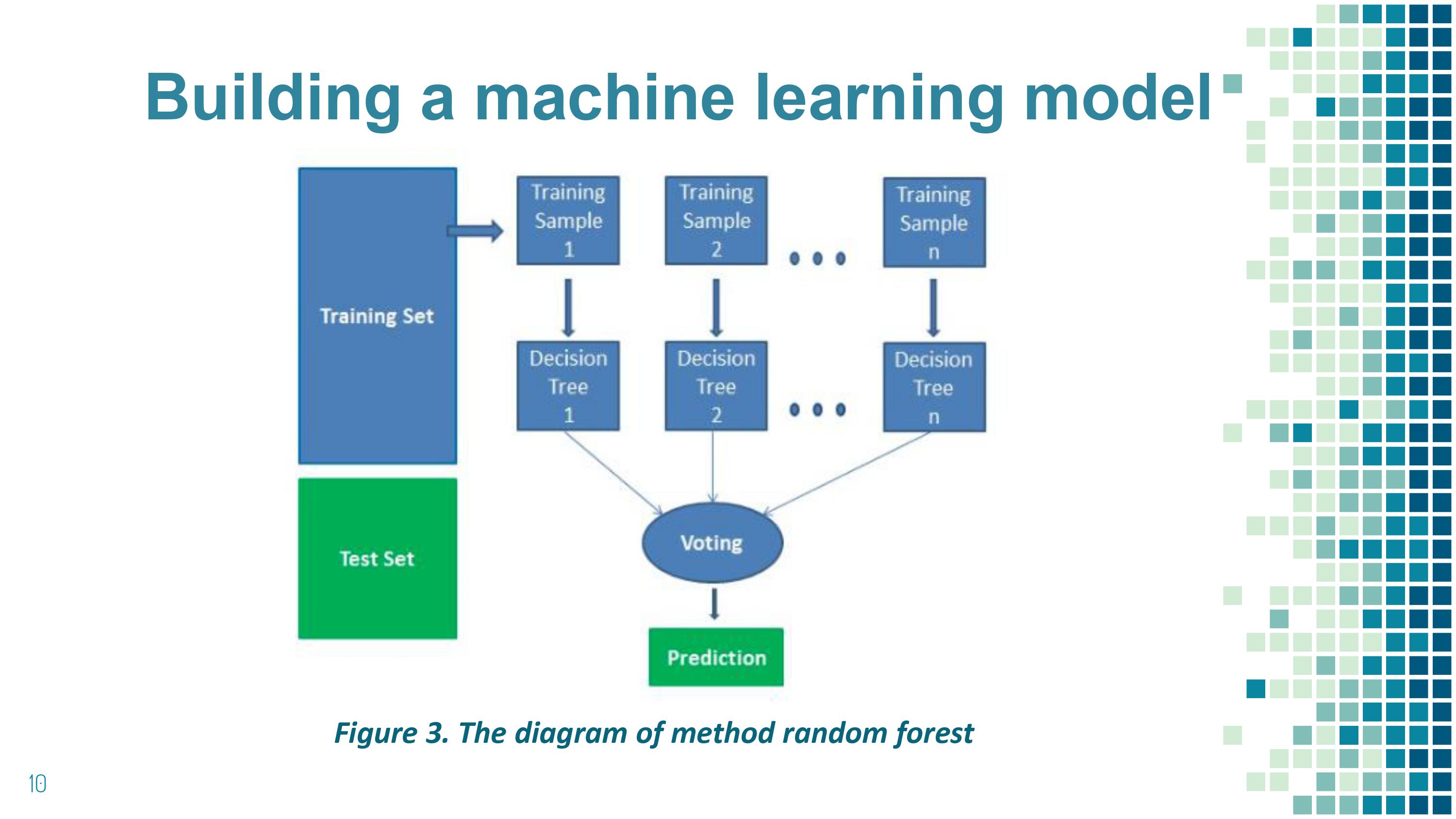 |
Building a machine learning model:
After extracting features, the next step is to build a machine learning model to automatically identify the class label of the flying targets.
Random Forest technique is proposed in this research to reduce the variances for the decision tree technique. Random Forest uses a combination of decision trees instead of only single one to improve the stability and accuracy of the classification result
The principle of Random forest to identify flying targets:
• Extract features of the flying targets
• Traverse features through each decision tree of the Random Forest.
• Each decision tree will give a vote for a class label with the input data.
• Aggregate the vote on each decision tree.
• The class label which received the most votes is the class label of the flying target.
|
|
ICACT20220272 Slide.10
[Big slide for presentation]
|
Chrome Text-to-Speach Click!! |
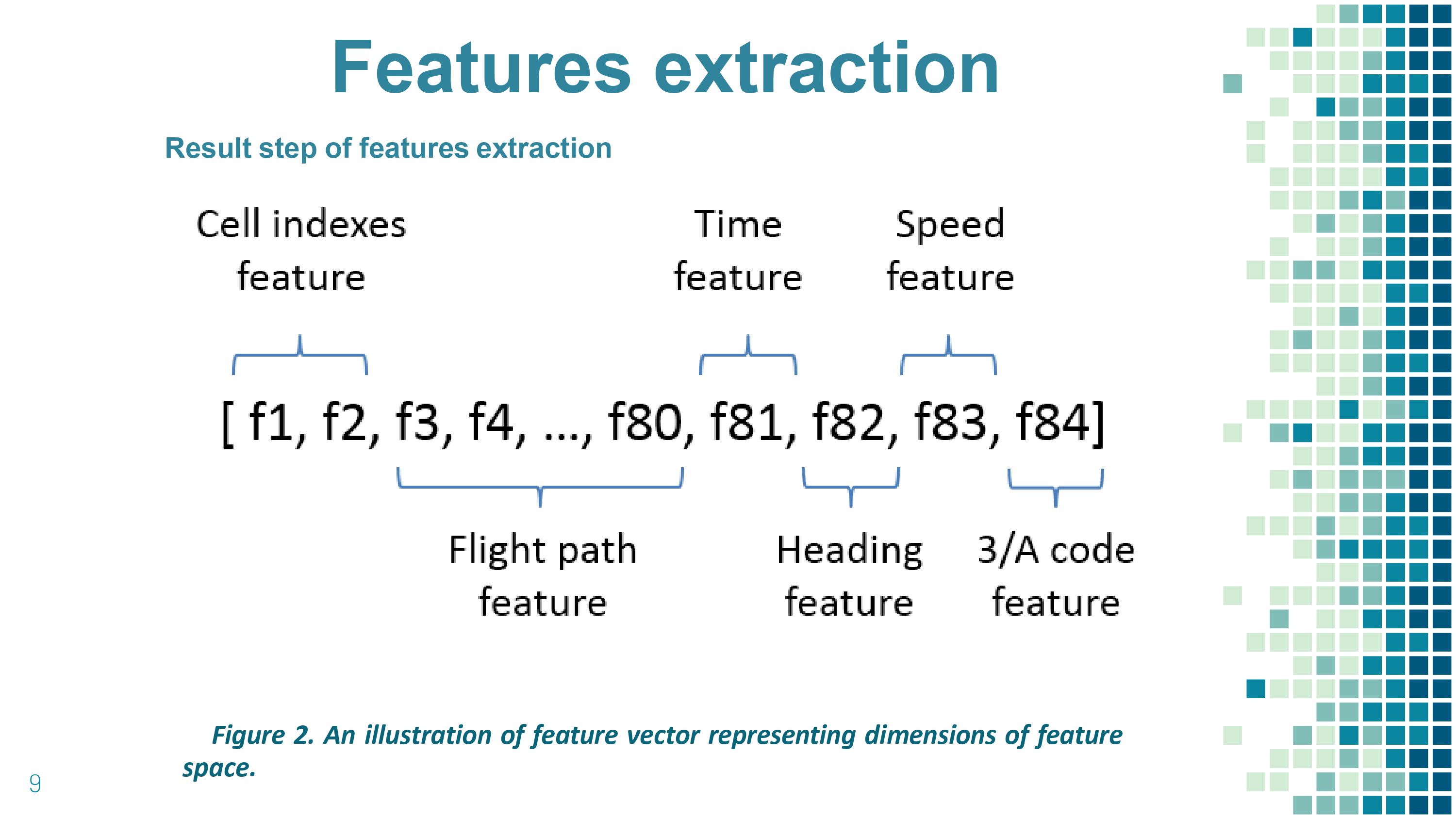 |
After steps Features extraction we combine them to construct an 84-dimensional vector (Figure 3):
• 2 dimensions for discretized longitude-latitude cell indexes.
• 78 dimensions for encoded flight paths.
• 1 dimension for encoded timing day/night.
• 2 dimensions for heading and speed.
• 1 dimension for 3A code.
|
|
ICACT20220272 Slide.09
[Big slide for presentation]
|
Chrome Text-to-Speach Click!! |
 |
The time information of the flying target in each coordinate point is too detailed, which is not suitable for the training phase of the model.
The principle of Extracting time information includes:
• We hence propose converting the time format from hour/minute/second format to day/night one.
• Day is assigned for time range from 6 am to 6 pm, and night is assigned for time range from 6pm to 6am.
• Day value is then be encoded as 1, while night value is encoded as 0.
|
|
ICACT20220272 Slide.08
[Big slide for presentation]
|
Chrome Text-to-Speach Click!! |
 |
Extracting flight path information: flight-path is also a good feature reflecting the character of the flying target. The identification labels of flying targets correlate with the characteristics of those flight paths. For instance: domestic flights must operate along the flight paths between domestic airports; international flights must operate along the flight paths which cross the country …
We suggest the method to extract information from the flight path by supplementing the information of the flight path crossing each cell in the discretized latitude-longitude grid. For example, if cell (0, 0) has 3 flight paths A, B, C cross it, the flight path information of the cell (0, 0) is (A, B, C)
The principle of extracting flight path features includes:
• The information of the flight path crossing each cell in the discretized latitude-longitude grid.
• Each flight path is assigned to a dimension of feature space, it is encoded by binary method with two values 0 and 1.
• To be specific: if the flying target does not follow a particular flight path, this one is encoded as 0; if the flying target follows a particular flight path, this one is encoded as 1.
For example, if we have totally three available flight paths: A, B, and C, hence the feature space will have three dimensions. If the flying target is a plane following A path, its feature will be encoded as (1,0,0), similarly, B and C one will be encoded as (0,1,0) and (0,0,1) and (1,1,1) for the whole three paths. In our work that applied in Vietnam, there are 78 flight paths, hence flight path information for each plane flying target will be encoded in 78 dimensions of the feature space.
|
|
ICACT20220272 Slide.07
[Big slide for presentation]
|
Chrome Text-to-Speach Click!! |
 |
In our implementation, the value of latitude width Δθ=0,5° and longitude width Δρ=0,5° give the best result. The coordinates of the flying target will be replaced with cell indexes that the plane belongs to, which means we map the plane’s coordinates to the cell indexes.
|
|
ICACT20220272 Slide.06
[Big slide for presentation]
|
Chrome Text-to-Speach Click!! |
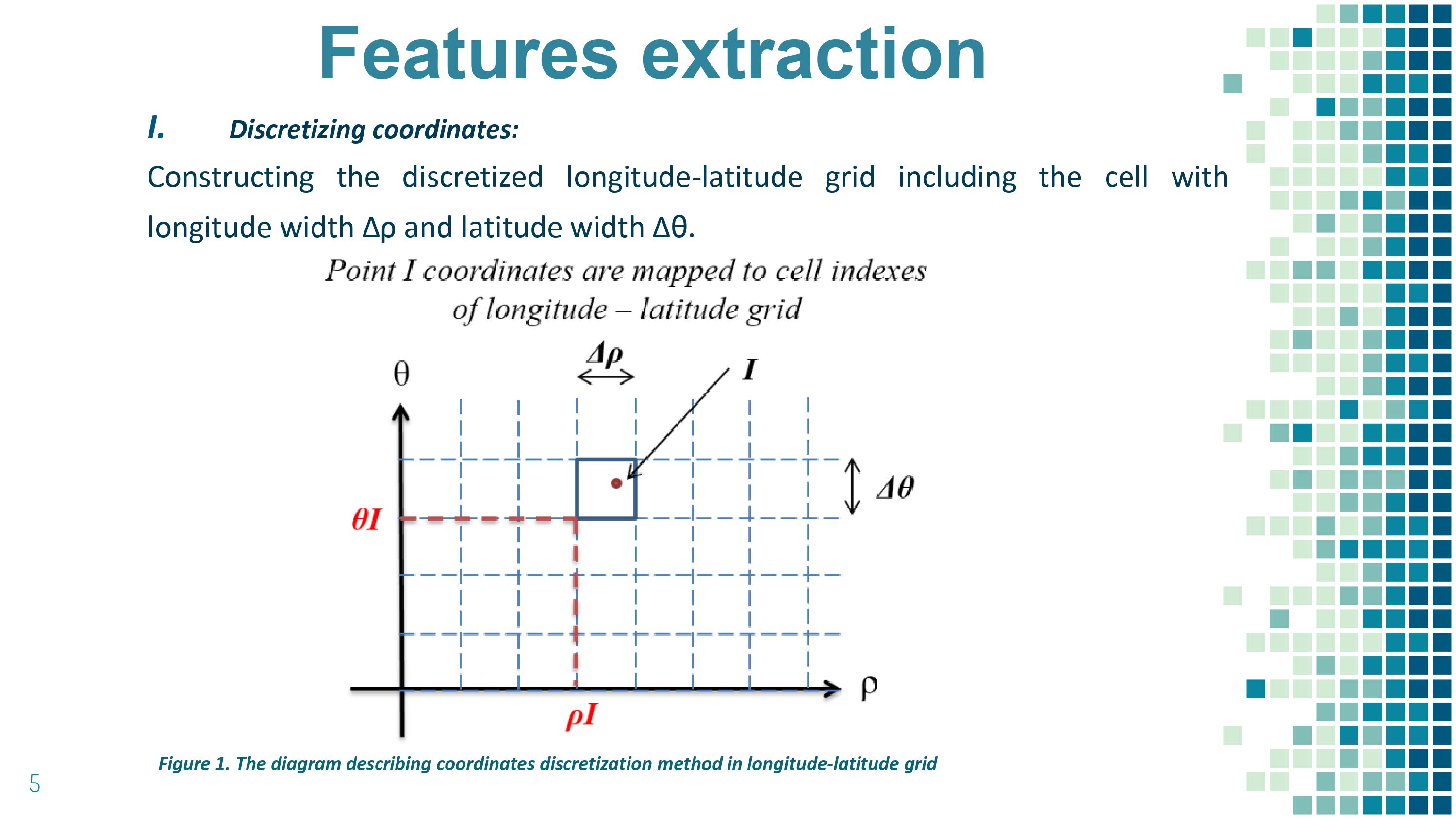 |
Coordinates of flying target are too accurate, hence they will cause over-fitting problems when being applied to the model. To handle this problem, we proposed to discretize that information in the longitude-latitude grid. The discretization method is explained as below:
- Constructing the discretized longitude-latitude grid including the cell with longitude width Δρ and latitude width Δθ. Those values of width are adjustable.
|
|
ICACT20220272 Slide.05
[Big slide for presentation]
|
Chrome Text-to-Speach Click!! |
 |
Method to automatically identify includes two steps:
• Features extraction.
• Building a machine learning model
Features extraction:
The original input data of the flying target include coordinates, heading, speed, time, and 3/A code (that information is only at an exact time). This information is too detailed, hence not suitable for being the feature of the data. As such, we need to generalize this information through the feature extraction process.
Building a machine learning model:
After extracting features, the next step is to build a machine learning model to automatically identify the class label of the flying targets. The set of class labels includes: military, domestic, transit, and international. Our machine learning method is Random Forest, which is built by ensemble decision trees.
|
|
ICACT20220272 Slide.04
[Big slide for presentation]
|
Chrome Text-to-Speach Click!! |
 |
The input data from radar are: • Physical information (coordinates, heading, speed) • Time, • Identification information (3/A code). The 3/A code is the identification information that contains 4-digit code which is assigned for each flying target based on the convention of aviation to distinguish among the flying targets The output is the identification label that includes: Military - flying targets being planes which belong to Ministry of Defense to perform mission Domestic- flying targets being planes with domestic flight route Transit - flying targets being foreign planes transiting in current’s country airspace International - flying targets being planes with flight route between the domestic airport and the foreign airport.
|
|
ICACT20220272 Slide.03
[Big slide for presentation]
|
Chrome Text-to-Speach Click!! |
 |
In military, target identification is often conducted
manually and based on personal experience. The goal is
mainly focused to clarify the target allegiance and its class
like ally or enemy, bomber, fighter or commercial jet, etc
There are some proposed methods:
Some early works determine the target class based on kinematic features such as the maximum speed or estimated acceleration, trajectories. They tried to measure how close the trajectory to the nearest known flight path that has already pre-defined.
Other approaches use machine learning, deep learning for classification. These methods have multidimensional data problems.
In this report, we propose a new method of feature
extraction that could automatically identify flying targets with
a simple Random Forest machine learning model.
|
|
ICACT20220272 Slide.02
[Big slide for presentation]
|
Chrome Text-to-Speach Click!! |
 |
Here, I show you the outline of this talk.
|
|
ICACT20220272 Slide.01
[Big slide for presentation]
|
Chrome Text-to-Speach Click!! |
 |
Hi everyone,
I am very excited to be here online and show you our work on a method to identify a flying target from radar data automatically.
This work has been done by a collaboration between our reasearch engineers and a professor in a university.
|