ICACT20230222 Slide.18
[Big slide for presentation]
[YouTube]
ICACT20230222 Slide.18
[Big slide for presentation]
[YouTube] |
Chrome Text-to-Speach Click!! Click!! |
 |
That’s all, thanks for your listening!
|
|
ICACT20230222 Slide.17
[Big slide for presentation]
[YouTube] |
Chrome Text-to-Speach Click!! |
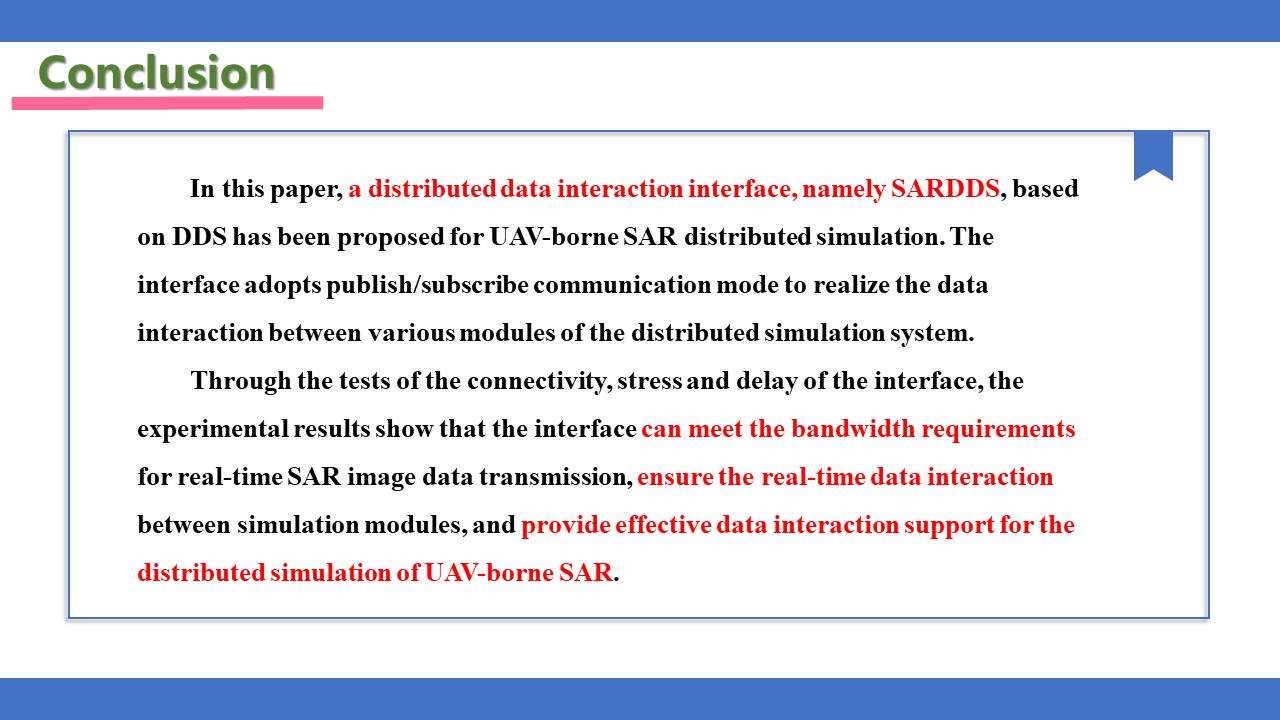 |
This paper mainly propose a data interaction interface based on DDS for UAV-borne SAR distributed simulation system. Through the tests of the connectivity, stress and delay of the interface, the experimental results show that the interface can meet the bandwidth requirements for real-time SAR image data transmission, ensure the real-time data interaction between simulation modules, and provide effective data interaction support for the distributed simulation of UAV-borne SAR.
|
|
ICACT20230222 Slide.16
[Big slide for presentation]
[YouTube] |
Chrome Text-to-Speach Click!! |
 |
Part four, conclusion.
|
|
ICACT20230222 Slide.15
[Big slide for presentation]
[YouTube] |
Chrome Text-to-Speach Click!! |
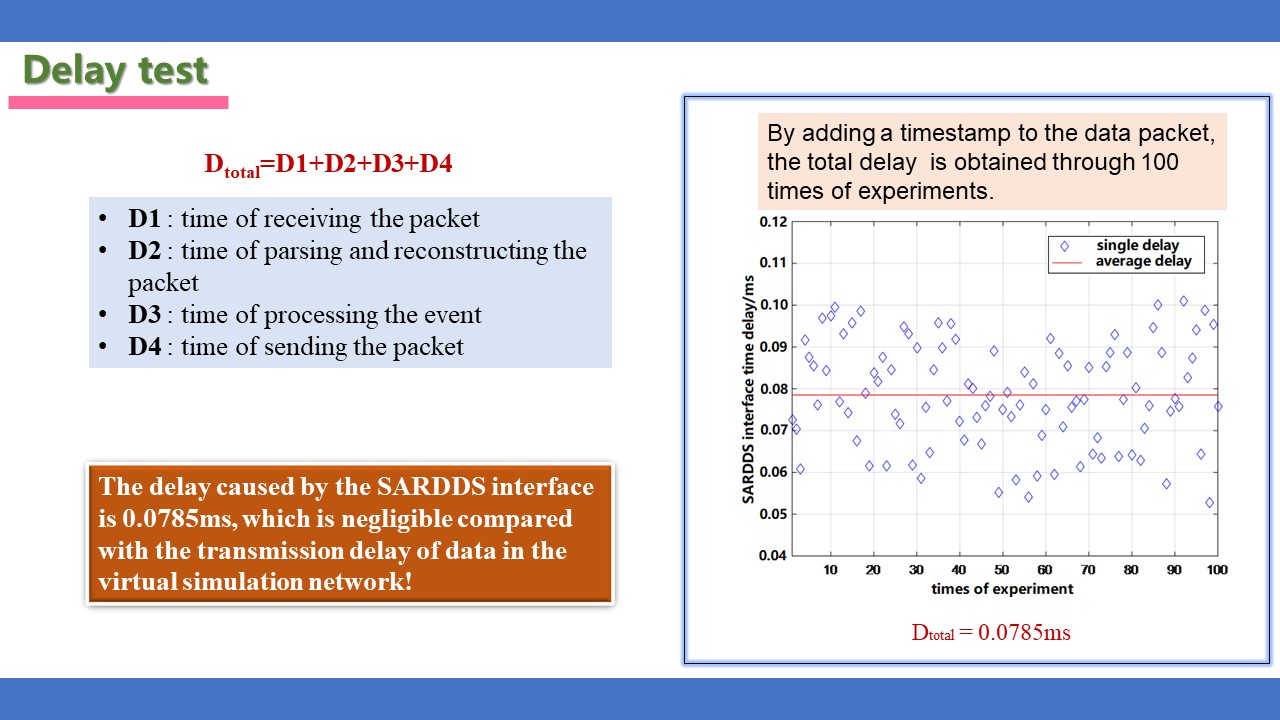 |
This part is delay test. The delay is mainly composed of four parts: D1 : time of receiving the packet; D2 : time of parsing and reconstructing the packet; D3 : time of processing the event ; D4 : time of sending the packet. By adding a timestamp to the data packet, the total delay is obtained through 100 times of experiments. As can be seen from the figure, the average delay of SARDDS is 0.0785ms, which is negligible compared with the transmission delay of data in the virtual simulation network!
|
|
ICACT20230222 Slide.14
[Big slide for presentation]
[YouTube] |
Chrome Text-to-Speach Click!! |
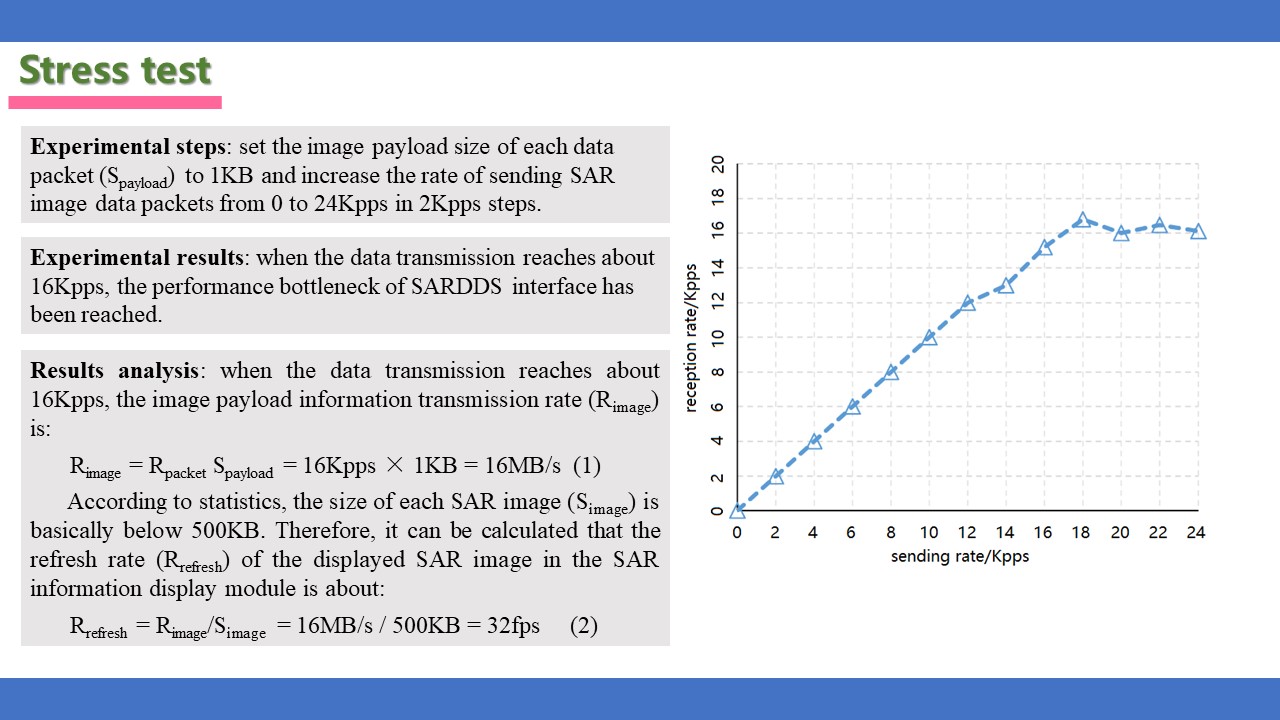 |
This part is stress test. We set the image payload size of each data packet to 1KB and increase the rate of sending SAR image data packets from 0 to 24Kpps in 2Kpps steps.
When the data transmission reaches about 16Kpps, the performance bottleneck of SARDDS interface has been reached. When the data transmission reaches about 16Kpps, the image payload information transmission rate (Rimage) is: 16MB/s. According to statistics, the size of each SAR image (Simage) is basically below 500KB. Therefore, it can be calculated that the refresh rate (Rrefresh) of the displayed SAR image in the SAR information display module is about: 32fps. As we all know, the minimum frame rate of smooth video viewed by human eyes is 24 frames per second (fps). This SARDDS interface supports the transmission of SAR image data to the SAR information display module for display at a maximum frame rate of 32 fps, which can ensure the smoothness of SAR image display. This shows that the data transmission bandwidth of the designed SARDDS interface is sufficient to meet the transmission of SAR image data.
|
|
ICACT20230222 Slide.13
[Big slide for presentation]
[YouTube] |
Chrome Text-to-Speach Click!! |
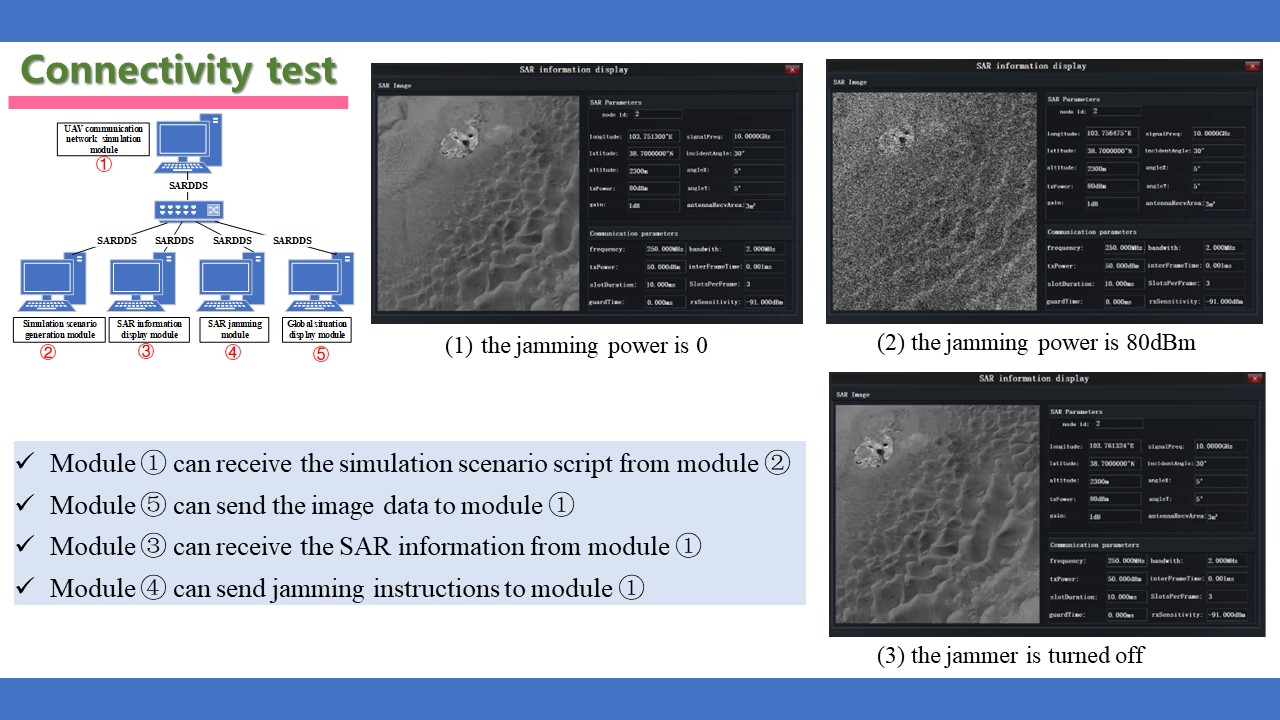 |
This part is connectivity test. After the simulation starts, SAR image and parameters can be displayed correctly, as shown in Figure (1). It means that module 2 can send simulation scenario to module 1. In the meanwhile, the module 5 can successfully send the image data through SARDDS interface, and then the module 1 receives the image data through SARDDS interface, transmits it to the base station node in the UAV simulation network, and then sends it to the module 3 for display through SARDDS interface. When the jammer is turned on, the SAR image is shown in Figure (2). When the jammer is turned off, the SAR image is shown in Figure (3). The results mean that the jamming instructions can be sent from module 4 to module 1. The experimental results show that the SARDDS interface can effectively support the data interaction between various modules of the distributed simulation of UAV-borne SAR.
|
|
ICACT20230222 Slide.12
[Big slide for presentation]
[YouTube] |
Chrome Text-to-Speach Click!! |
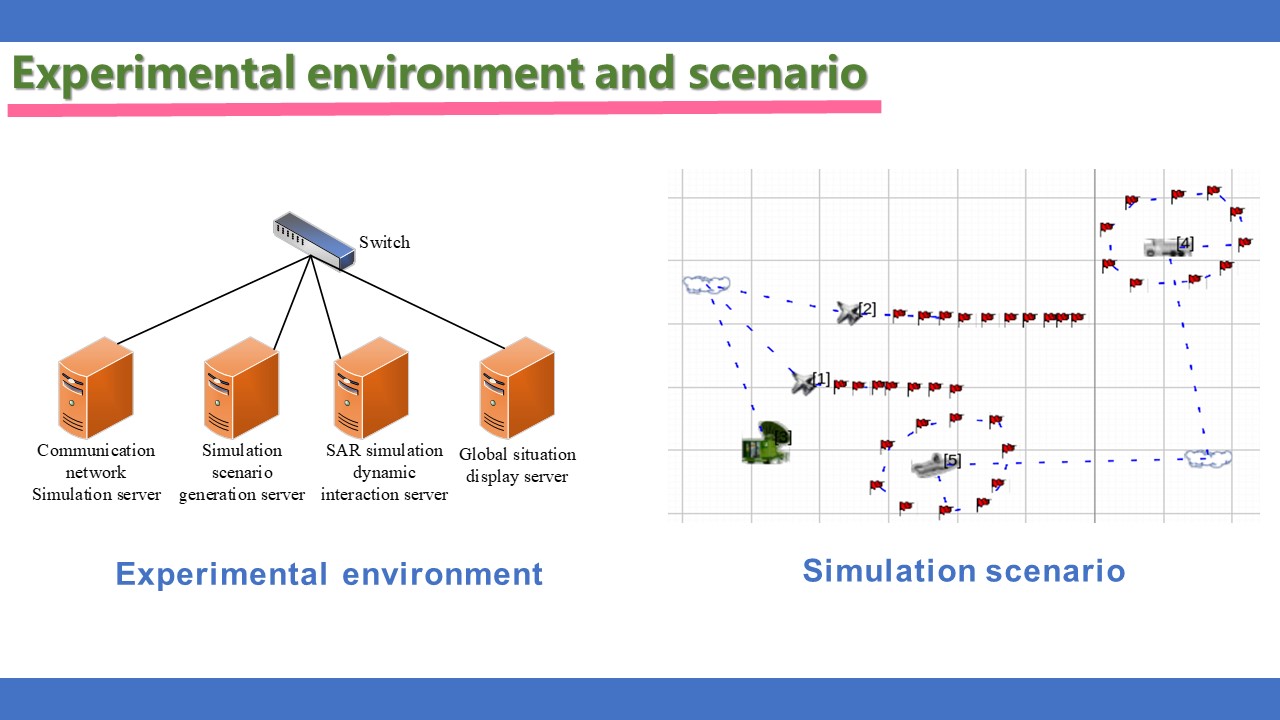 |
Here are the experimental environment and scenario. The experimental environment is in the left side. Let’s look at the simulation scenario in the right side. The SAR payload is in the task UAV node 2, which transmits the detected SAR image data to the base station node 3 through the relay UAV node 1. In addition, nodes 4 and 5 are jammer nodes.
|
|
ICACT20230222 Slide.11
[Big slide for presentation]
[YouTube] |
Chrome Text-to-Speach Click!! |
 |
Part three, experiments and results.
|
|
ICACT20230222 Slide.10
[Big slide for presentation]
[YouTube] |
Chrome Text-to-Speach Click!! |
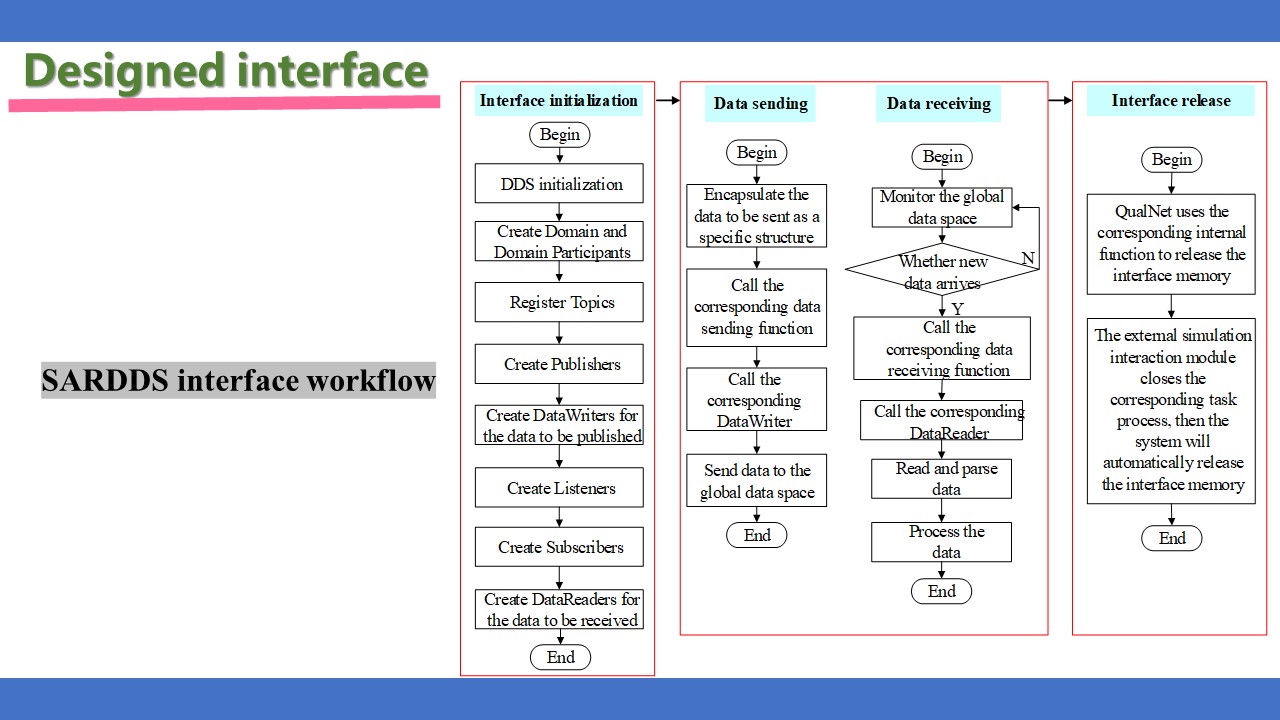 |
This is the SARDDS interface workflow. The first step is Interface initialization. The initialization of the SARDDS interface is completed in the constructor of the customized MyDDS class, which successively completes the creation of the Domain, Domain Participants, Topics, Publishers, DataWriters, Subscribers, Listeners and DataReaders. After the simulation starts, each module encapsulates the data to be sent into a specific structure, then calls the corresponding data sending function, and uses DataWriter to send the data to the global data space. In the meanwhile, the SARDDS interface will monitor the global data space. When new data arrives, the corresponding data receiving function will be called, the DataReader will be used to receive the data, and finally the corresponding data processing function will be called to process the data. In the end of simulation operation, the interface memory resources should be released. QualNet uses the corresponding internal function to release the interface memory. The external simulation interaction module closes the corresponding task process, then the system will automatically release the interface memory.
|
|
ICACT20230222 Slide.09
[Big slide for presentation]
[YouTube] |
Chrome Text-to-Speach Click!! |
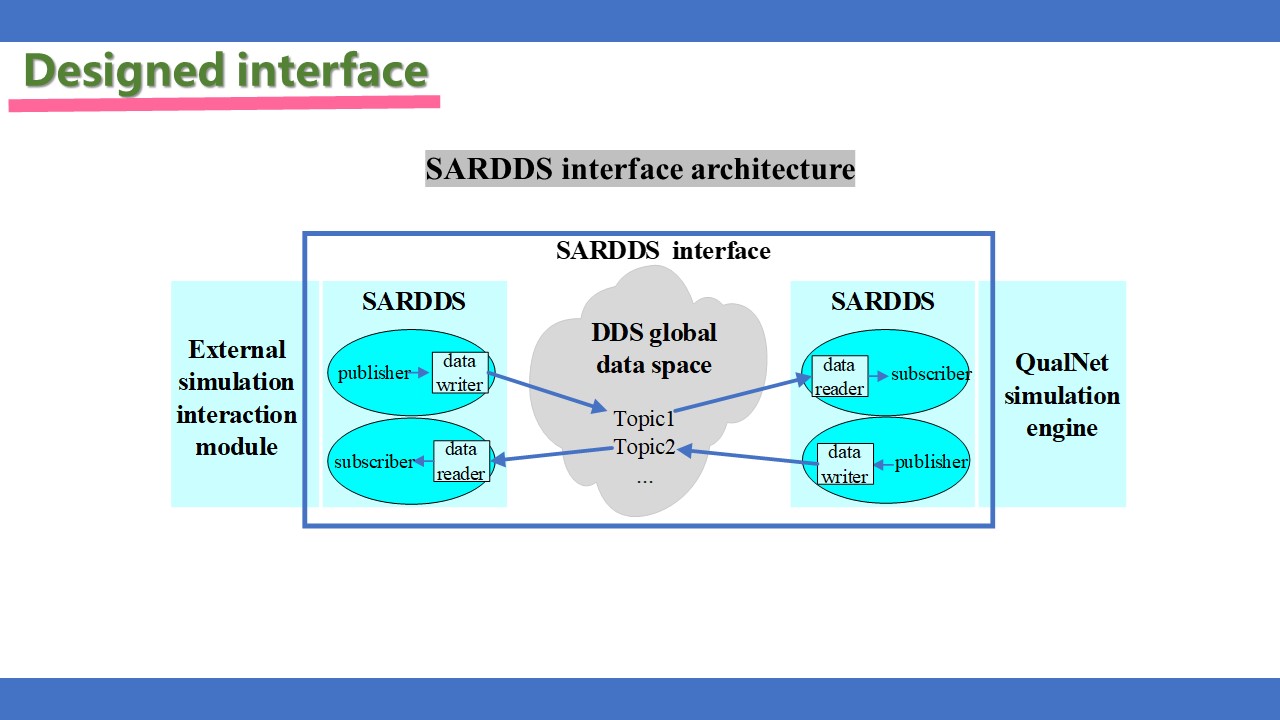 |
SARDDS interface architecture is mainly composed of three modules: QualNet simulation engine data interface, External simulation interaction module data interface and DDS global data space. QualNet simulation engine data interface follows the development specification of QualNet simulator, including publishers and subscribers of almost all topics, and is responsible for data interaction between QualNet simulation software and external simulation interaction modules. External simulation interaction module data interface is encapsulated in the visual C++ project of each external simulation interaction model, including publishers and subscribers created by each module according to its own data receiving and sending requirements. DDS global data space is a virtual shared global data space for all distributed simulation modules. The publisher of each module sends the data to the global data space, and the subscriber obtains the corresponding data from the global data space according to their own requirements.
|
|
ICACT20230222 Slide.08
[Big slide for presentation]
[YouTube] |
Chrome Text-to-Speach Click!! |
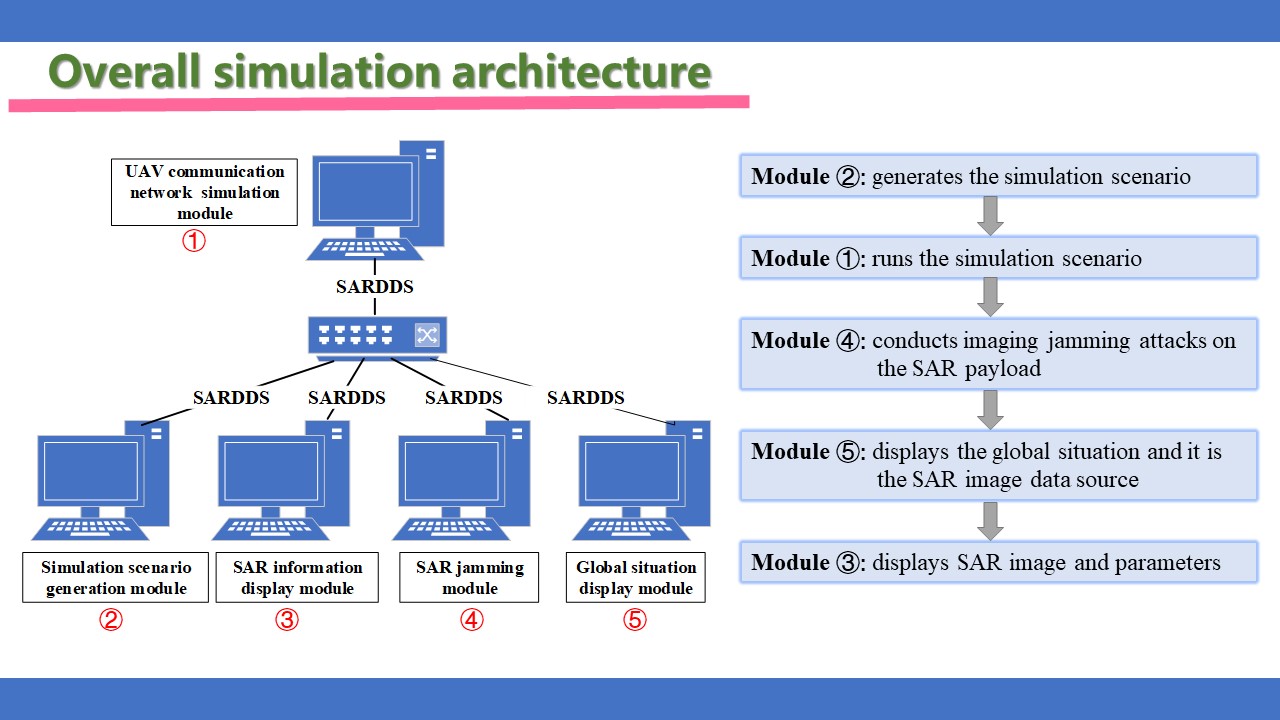 |
The UAV-borne SAR distributed simulation architecture considered in this paper is here. Module 1 is UAV communication network simulation module, which runs the simulation scenario. Module 2 is simulation scenario generation module, which generates the simulation scenario. Module 3 is SAR information display module , which displays SAR image and parameters. Module 4 is SAR jamming module, which conducts imaging jamming attacks on the SAR payload. Module 5 is global situation display module, which displays the global situation and it is the SAR image data source.
|
|
ICACT20230222 Slide.07
[Big slide for presentation]
[YouTube] |
Chrome Text-to-Speach Click!! |
 |
Part two, designed interface.
|
|
ICACT20230222 Slide.06
[Big slide for presentation]
[YouTube] |
Chrome Text-to-Speach Click!! |
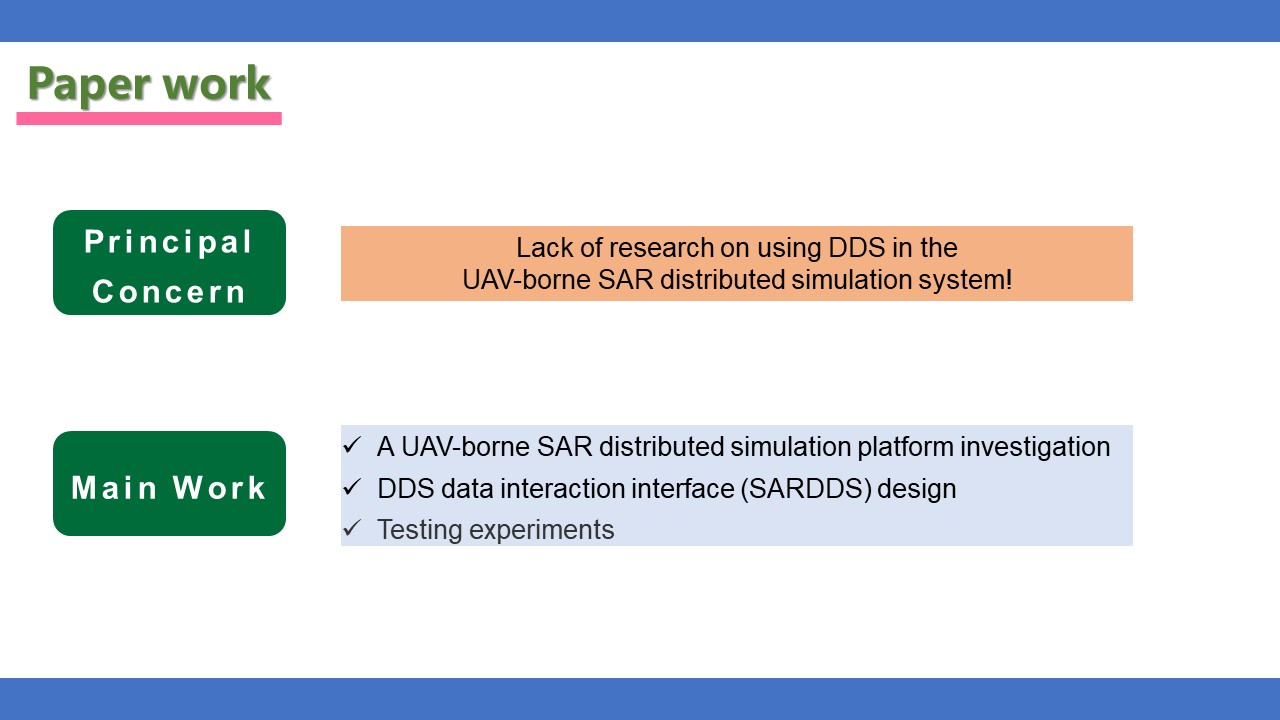 |
Therefore, the work of this paper is summarized as shown. Firstly, we investigate A UAV-borne SAR distributed simulation platform. Then, we design the DDS data interaction interface. Finally, we conduct some testing experiments on this system.
|
|
ICACT20230222 Slide.05
[Big slide for presentation]
[YouTube] |
Chrome Text-to-Speach Click!! |
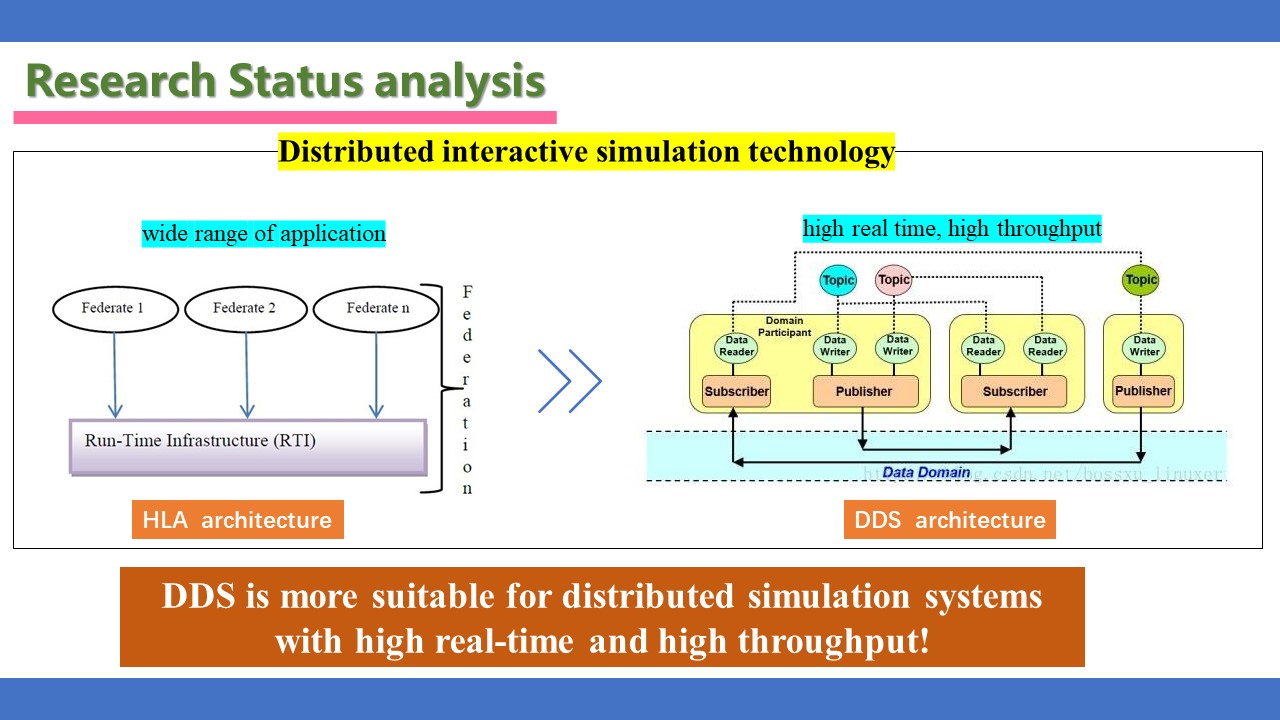 |
Distributed interactive simulation technology has been developed for many years. At present, HLA architecture and DDS architecture are widely used in many distributed interactive simulation system. The data transmission of UAV-borne SAR distributed simulation system has the requirements of high real-time and high throughput, which means that DDS architecture is the best choice for the simulation system.
|
|
ICACT20230222 Slide.04
[Big slide for presentation]
[YouTube] |
Chrome Text-to-Speach Click!! |
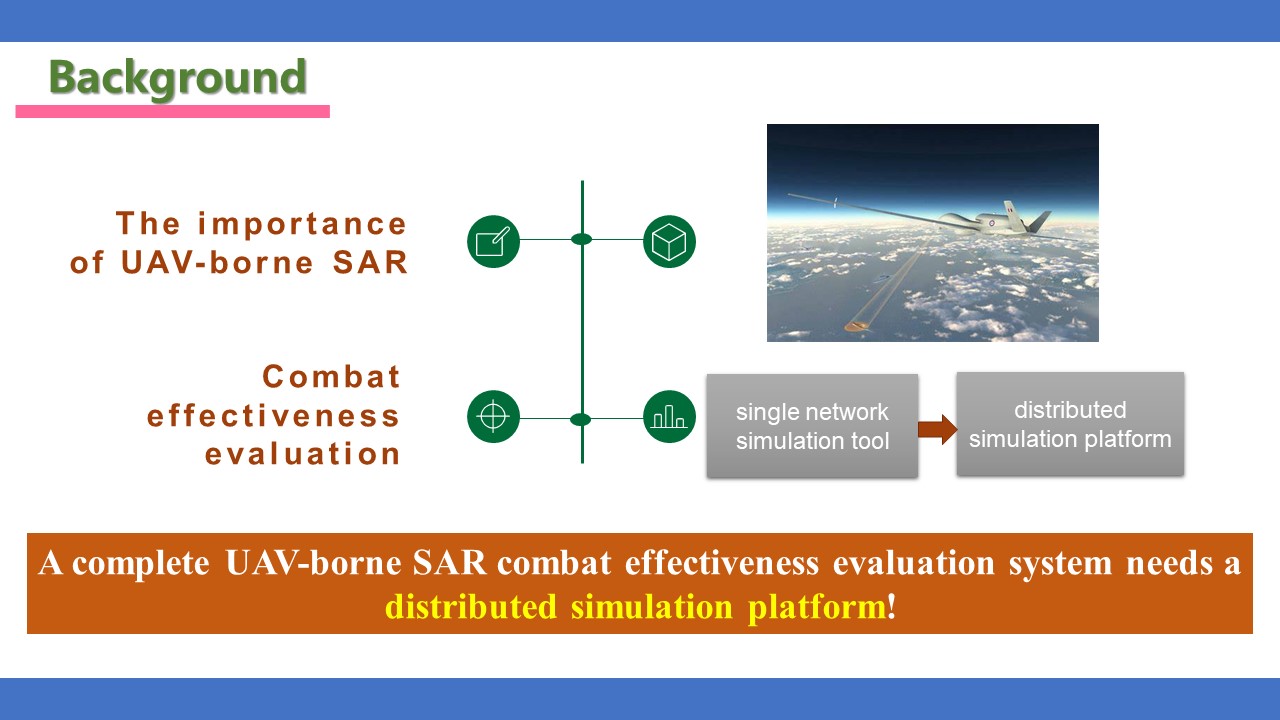 |
UAV-borne SAR has played an important role in the field of military reconnaissance, due to its advantages such as strong survivability, high resolution and high flexibility. Using simulation technology to evaluate the combat effectiveness of UAV-borne SAR can not only save costs, but also have more flexibility. In order to realize the comprehensive evaluation of the combat effectiveness of the UAV-borne SAR equipment, it is not only essential to focus on the test and verification of the single function and performance index of the UAV-borne SAR, but also to consider the complex operational environment and the intended operational missions in operational system. Therefore, A complete UAV-borne SAR combat effectiveness evaluation system needs a distributed simulation platform!
|
|
ICACT20230222 Slide.03
[Big slide for presentation]
[YouTube] |
Chrome Text-to-Speach Click!! |
 |
Part one, Introduction.
|
|
ICACT20230222 Slide.02
[Big slide for presentation]
[YouTube] |
Chrome Text-to-Speach Click!! |
 |
My presentation is organized in 4 parts——introduction, designed interface, experiments and results and conclusion.
|
|
ICACT20230222 Slide.01
[Big slide for presentation]
[YouTube] |
Chrome Text-to-Speach Click!! |
 |
Hello, everyone! I’m Tang Feixi, from Beijing Institute of Technology. It’s my honor to be here to share you with my paper. The title is A Design of Data Interaction Interface Based on DDS for UAV-Borne SAR Distributed Simulation.
|